Inline variables is one of the cool new feature coming in 10.3. The obvious huge use case is loop control variables, but I just discovered another great use case while reviewing some code.
procedure DoesSomething;
var
var1, var2: Integer;
begin
// use var1
{$IFDEF Something}
// use var1 & var2
{$ENDIF Something}
end;
This is a pattern I see a lot, and it generates a hint on var2 being unused based on the current compiler directive status.
[dcc32 Hint] myUnit.pas(123): H2164 Variable 'var2' is declared but never used in 'DoesSomething'
Now there are a number of ways to deal with this with more compiler directives, which is what I’ve done in the past, but I never like adding more compiler directives. It makes the code way more complicated and harder to maintain. Now with Inline Variables I can simplify it, make it easier to maintain, and hande the hint! (all of which makes me so happy!)
procedure DoesSomething;
var
var1: Integer;
begin
// use var1
{$IFDEF Something}
var var2: Integer;
// use var1 and var2
{$ENDIF Something}
end;
Happy dance commencing in T-minus 10 seconds.
What are some interesting ways you see inline variables benefiting you?
Me with a Spartan Boba Fett. I thought he was more of a Delphi Dude (FanX Salt Lake City – 2018)
Cosplay (aka costume-play) takes the fun and imagination of childhood dress-up to extreme levels only justifiable by an adult! Not only is it expensive, and needs a large time commitment, but it is rarely comfortable.
Comic conventions are the usual place to find cosplay, but Halloween is also a good excuse for some cosplay fun. I’m a huge fan of creative cosplay and love getting my picture with cosplayers.
In writing this post I realized I am frequently attaching LEDs to my face.
The V character from Cyberpunk 2077. Cosplayer Maul. photo by eosAndy. His cosplay is much better than mine.
I’m a big fan of both the book and the original RPG and am looking forward to the video game. I combined elements from all three sources for my cosplay. The character V is more of a Street Samurai / Solo, while I wanted to go for more of a Decker / Netrunner (a little Shadowrun RPG influence in there too).
At this point the secret is out, I’m a huge nerd. I love Role Playing Games, and Cyberpunk & Shadowrun are my favorite genres.
I didn’t have my RGB Shades in time for Salt Lake FanX, so I justed glued some extra LEDs (NeoPixel 4×4 grids) to my face. They represent cybernetic enhancements, which is why I left the wires exposed. I used an Arduino MEGA 2560 by ELEGOO as the controller. It also controlled the string of NeoPixel lights in the collar. I attached a Bluetooth keyboard to one wrist and an Android Pixel phone to the other. The phone was decorative for now.
Cyberpunk 2077 cosplay LEDs straight on. They changed colors, and weren’t always red and green.
Arduino MEGA 2560 behind my back controlled everything.
Wrist mounted smartphone, light up collar, LEDs glued to my face, and el wire on my arm.
Later I got my RGB LED Shades which will become the key to my outfit for this Halloween. The RGB LED Shades use an Arduino Mini as the brains. I added an HC-06 Serial Bluetooth module to control the leds remotely.
Wearing the RGB LED Shades
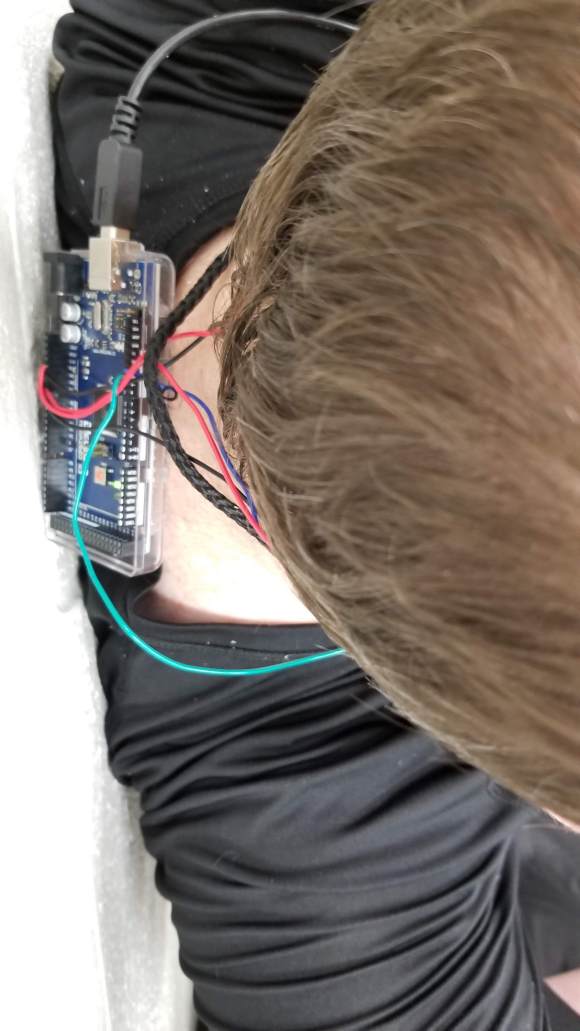
Attaching the HC-06 to the RGB LED Shades
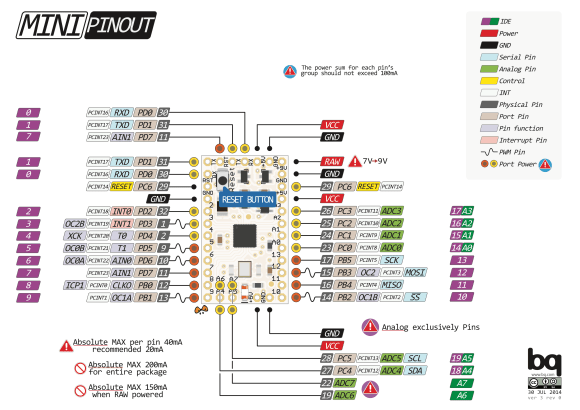
After soldering the HC-06 onto my shades I can power them up and pair my Android phone with the HC-06 module. One note about my soldering is that if you look you will see that it is connected to two analog pins instead of digital pins. On most Arduinos the analog pins can double as digital pins (see the Pinout).
Android Bluetooth Pairing Dialog
After that, a TBluetooth component is able to open a socket to the shades. Start the pairing with Bluetooth1.DiscoverDevices( 5000 ); In the DiscoveryEnd event handler the following code will open a socket to the HC-06 module (Thanks to Boian Mitov for the basis of this code):
var
ADevice : TBluetoothDevice;
AService : TBluetoothService;
begin
for ADevice in ADeviceList do
begin
// HC-06 is the name of the bluetooth device
if ADevice.DeviceName = 'HC-06' then
begin
Bluetooth1.Pair( ADevice );
for AService in ADevice.LastServiceList do
begin
// FSocket is a TBluetoothSocket with larger scope
FSocket := ADevice.CreateClientSocket(
AService.UUID, False );
If Assigned( FSocket ) then
begin
FSocket.Connect;
Break;
end;
end;
Break;
end;
end;
end;
Once the socket is open you can send characters with this code.
It is so easy to work with Classic Serial Bluetooth in Delphi (or C++Builder) and the TBluetooth component. You even could send a whole string or other binary data. For this project a single character was all I needed to change modes on the shades. A single character is also easier to process on the Arduino side. (Technically Bluetooth Classic works on all platforms, but on iOS you need special approval from Apple on a per app basis.)
I’m wearing the Rio RGB Shades with the Delphi powered controller on my Android phone
I took my RGB Shades with me to Sao Paulo Brazil for the 10.3 Rio preview. Even though the Bluetooth worked before the conference, my phone couldn’t make the connection on stage. When I opened my phone’s Bluetooth connection window it was obvious that with 750+ people in attendance there were a few hundred Bluetooth devices broadcasting on the same wavelength.
David Millington kicking off the 10.3 Keynote
My next project involves Bluetooth LE with these RGB LED Steampunk Goggles.
RGB LED Steampunk Goggles
I built them a year ago from an AdaFruit kit. Later I added a Bluetooth LE Module to make them controllable. Unfortunately, my soldering didn’t hold up and I need to rebuild them. This makes them both my previous and next cosplay project.
RGB LED Goggles, a horse mask, and a Los Angeles Kings hockey jersey (don’t ask)
I’m considering salvaging the NeoPixels and rebuilding them with an ESP32 microcontroller. The ESP32 is a little larger than the original Trinket microcontroller. This is because it has integrated Bluetooth LE, WiFi, and more pins. I’d also like to get some 50% mirrors to create an infinite LED tunnel effect (I’ll post pictures when I get them – it is really amazing).
I met Star Lord!
I’ve worked with the TBluetoothLE component before and it is even easier to work with than TBluetooth. So I’m really looking forward to this project.
On the Arduino side, you can use the Arduino IDE and flex your C programming skills. Or you can do like I usually do and use Visuino by Boian Mitov of Mitov Software. It provides a visual drag and drop interface for programming Arduino devices. It won the Embarcadero Cool App contest in April 2017 as Boian used Delphi to develop Visuino. Boian also recently added RGB LED Shades support to Visuino (along with unboxing and assembly videos.)
Visuino makes Arduino and LED RGB Shade development easy. It is an Embarcadero Cool App developed with Delphi!
I think Boian is a great guy who makes some great technology. Most of it has a free version and the commercial prices are very reasonable too. He is always very helpful as well.
Boian and Jim at the 2017 SoCal CodeCamp in Los Angeles
So what’s next (after the Bluetooth LE RGB Steampunk Goggles obviously)? I’m working on a design for an electronic physical polyhedral die with Bluetooth LE. So you roll a physical die of a single size and it can become any number of sides you need, all controlled via your phone. Did I mention how much of a nerd I am?
We just shared a preview of 10.3 Rio in Brazil on Tuesday, the 23 of October here at the Embarcadero Conference in São Paulo. Over 750 developers were in attendance, and the speakers included many Embarcadero and Sencha MVPs. I snapped a few pictures from the event that I thought I would share.
With a name like 10.3 Rio is great we were able to do a preview event in Brazil as part of their annual developer conference. I’ve been in attendance every year since I started at Embarcadero, and it is something I always look forward to. Most years the attendance is around 400 to 500. I’m sure the news about 10.3 Rio and the recent Community Edition helped contribute to the high attendance numbers this year. Either way it is great to see the Delphi developer community continue to grow.
I hope to get some more of the pictures I was in with the MVPs and other speakers, as well as some other general conference pictures. I’ll share those later when I get them.
All the sessions were the same room with the attendees using headsets to switch between the audio tracks. If you didn’t have a headset the room was pretty quiet.
David Millington kicking off the Keynote where we previewed some 10.3 Rio features
The Exhibit Hall with some great partners
This is me in front of the welcome sign
David Millington in front of the welcome sign
I’m wearing the Rio RGB Glasses with the Delphi powered controller on my Android phone
Kelver and Fernando with David and I
David Millington showing new Delphi language features
Stay tuned for more news about 10.3 Rio and other pictures from the event!
The FireDAC Enterprise Connectors (#FDEC) by CData and Embarcadero make it really easy to work with various APIs just like you would any SQL database. For example if you want to publish the results of a query to a Google Sheet (which I find incredibly useful) then it is just a few FireDAC components and you are off to the races. You might run into an API limit though.
What is an API limit? Most rest services have a limit to how often a client can call a specific API within a certain amount of time. Google calls this their usage limit:
This version of the Google Sheets API has a limit of 500 requests per 100 seconds per project, and 100 requests per 100 seconds per user. Limits for reads and writes are tracked separately. There is no daily usage limit.
That may seem like a lot, but I found I was running into that limit pretty quick once I moved my project into production. Luckily FireDAC and the FireDAC Enterprise Connectors have a simple workaround: Batch Processing.
Using the Array DML features of FireDAC you can batch multiple DML (Data Manipulation Language) operations into a single API call. The FDEC Google Sheets documentation from CData doesn’t cover Array DML, but the component supports this (they are updating the documentation). The Elasticsearch documentation does cover Batch Processing with an example, and I’ve used this with Sheets and it works great!
Bulk Insert
The following example prepares a single batch that inserts records in bulk.
This month I am celebrating my five-year anniversary with Embarcadero Technologies. It’s been an amazing adventure and I am looking forward to more. I saw a graphic similar to the following today and it reminded me how great it is to be doing what I am doing (plus I love Venn diagrams).
I truly do love what I am doing, and I love the people I work with. Everyone I work with inside Embarcadero is amazing, plus I get to work closely with the MVPs, Tech Partners, and all the amazing members of the community. Most of what I do is stuff I used to do as an MVP before coming to Embarcadero. It was essentially my hobby. I would even take vacation time and spend my own money to travel to speak at conferences.
I frequently talk to developers who express their appreciation of the work I do as a developer advocate – I love training and sharing what I know. Not to mention all the gratitude I hear from developers for the productivity they get from Embarcadero’s tools. The reality is Embarcadero’s tools help developers make the world a better place.
I started right before the release of RAD Studio XE5 in 2013, which added support for Android. iOS and macOS were great, but once RAD Studio had Android it was a gamechanger. So many people just added Android as a target to their iOS apps, made a few layout tweaks, and they had a native Android app!
Since then we’ve added so many great features, plus Linux and the new Free Community Edition!
When it comes to monetary pay I’m really looking for a way to take care of my family. Beyond that, my job pays a lot in satisfaction because I believe in what I do. It certainly helps that Software Developer was rated the #1 job this year. I’m not directly a developer, but software development is a big part of my job, and I work with a lot of amazing developers.
It’s been an amazing five years. Despite a few bumps I am so happy for where we are going, what I do here, and where Delphi, RAD Studio, and Embarcadero are headed. It is always rough when you go through a merger, but the new Community Edition is a direct result of the changes in philosophy that Idera brought. And now I get to work with Sencha, Ranorex, Gurock, and others that make up the Idera family.
I’m looking forward to many more years doing what I love here with Embarcadero!
One of the great things about Delphi is not only is it written in Delphi (mostly), but it ships with the VCL, RTL, & FMX source code. You can use this source code in lots of different ways, which I’ll cover in a bit, but sometimes it is a matter of finding the source file with the code you want. There are over 2,234 Delphi source files in the source folder, so it can take a while to find the right file if you don’t know where to look. Not to mention the 1,711 C files, and a few thousand other assorted files.
I used to use various GREP and full text searching tools to find the code I was looking for, but then I realized Windows 10 (and earlier versions) has a search function built into it, but you need to make a few configuration changes to use it effectively. So I thought I would outline those for you.
Your source folder is usually located in C:\Program Files (x86)\Embarcadero\Studio\19.0
but it might be different depending on your installation. I usually Pin it to Quick Access, which makes it easy to access since I find I’m there a lot.
Windows Search and Indexing Options
The next thing to do is configure your Indexing Options. This is what makes it quick to search for files you need. You can find Indexing Options in Control Panel, or just runcontrol.exe srchadmin.dll.
There are two steps to get the most out of Windows search for your source code. The first is you need to activate Windows search for the file extensions you want, and the second it to tell it to index your folders.
To add PAS files to indexing click Advanced and go to File Types. You can just type PAS in the list of file types and it will find it for you. You don’t need to add a new extension. PAS files are already listed, but just not indexed by default. Just put a check next to it, and change the “How should this file be indexed?” to “Index Properties and File Contents” that will index all the text contents of the file
By default all your user folders are indexed, but Source is in your Program Files folder, so you need to explicitly add it. From the main Indexing Options window click Modify and from there you can add any folder you want to search.
It takes a while a while to build and update the index after this change. You just gave it 2,000 more files to index. It has to read all the text out of them, which takes a while. Once it is done then just go to your source folder and use the search box to quickly find the code you are looking for.
Everything Search
Another great tool to use, to search by file name is the Everything desktop search engine by Voidtools. The thing I love about using Everything is it searches all the file names on your system quickly. The difference between it and Windows Search is Everything only searches the file names, but it searches all the file names.
I find I usually remember the name of a file, but not exactly where I left it. This makes Everything indispensable for me.
Using the Source
So how useful is it that Delphi, RAD Studio and C++Builder includes all this source code? What all can you do with it?
Finding that function – You know how I said I can remember the name of a file, but not where I put it? I do the same things with classes and functions. I can remember the name of the method or class, but not which unit it is in. Being able to search all of the source instantaneously to find the source file you need is a huge help.
Learning – Just reading source isn’t the best way to learn to program, but having access to the source code is a great way to gain a deeper understanding.
Debugging – Sometimes your program doesn’t behave the way you expect it to. When all you have is a blackbox then you are unable to figure out what is happening behind the scenes. When you have the source code you can not only see how that method is implemented, but also debug into the source code, using all the great debugger features.
Adding New Features – Maybe there is a new API that was just released, or you need to access an obscure API or 3rd party feature. Since you have access to all the source you can see how other similar APIs are accessed and use that as a roadmap.
Fixing or Changing Functionality – One man’s bug is another man’s feature. Sometimes there are bugs you need to fix in the shipping source code, other times you just want to change the way things work. For small changes I just copy the source file out into my project directory. Then my code will use my modifications instead of the original implementation. While you can’t redistribute changed source code, you can compile the code into your program. If you do need to share your changes or fixes you can share a change-set that only contains your changes.
A little fun with Delphi for today’s Star Wars day!
This is a pretty simple 3D form with a 3D layout at an angle, and then a 2D layout with text and images is animated up the 3D layout. The only code is populating the labels as the animation kicks off automatically.
Download the code and run the full credit scroll, or change the message to share with your friends. It is FireMonkey, and while I only tested it on Windows, it should work on Android, iOS, macOS, and even Linux if you are running FMX Linux.
A live conversation with TMS Software’s Bruno Fierens, Wagner Landgraf, & Holger Flick about some of the latest technology to come out of TMS Software.
So the private IP is different from the public IP. I’ll need to test to see if it is mapped with NAT or something. Seems unlikely though. Google offers public facing computers as part of their cloud services, so it makes sense that you would use those instead.
Retrieving speedtest.net configuration...
Testing from Google Cloud (35.199.148.57)...
Retrieving speedtest.net server list...
Selecting best server based on ping...
Hosted by Mimosa Networks (San Jose, CA) [17.60 km]: 40.662 ms
Testing download speed........
Download: 322.69 Mbit/s
Testing upload speed........
Upload: 260.94 Mbit/s
322.69 Mbit/s down and 260.94 Mbit/s up is really impressive! So if you have a task that requires a lot of bandwidth and then condenses it down to a smaller digest, it would be a really useful platform.

























 The FireDAC Enterprise Connectors (#FDEC) by CData and Embarcadero make it really easy to work with various APIs just like you would any SQL database. For example if you want to publish the results of a query to a Google Sheet (which I find incredibly useful) then it is just a few FireDAC components and you are off to the races. You might run into an API limit though.
The FireDAC Enterprise Connectors (#FDEC) by CData and Embarcadero make it really easy to work with various APIs just like you would any SQL database. For example if you want to publish the results of a query to a Google Sheet (which I find incredibly useful) then it is just a few FireDAC components and you are off to the races. You might run into an API limit though.
 I frequently talk to developers who express their appreciation of the work I do as a developer advocate – I love training and sharing what I know. Not to mention all the gratitude I hear from developers for the productivity they get from Embarcadero’s tools. The reality is Embarcadero’s tools help developers make the world a better place.
I frequently talk to developers who express their appreciation of the work I do as a developer advocate – I love training and sharing what I know. Not to mention all the gratitude I hear from developers for the productivity they get from Embarcadero’s tools. The reality is Embarcadero’s tools help developers make the world a better place. I started right before the release of RAD Studio XE5 in 2013, which added support for Android. iOS and macOS were great, but once RAD Studio had Android it was a gamechanger. So many people just added Android as a target to their iOS apps, made a few layout tweaks, and they had a native Android app!
I started right before the release of RAD Studio XE5 in 2013, which added support for Android. iOS and macOS were great, but once RAD Studio had Android it was a gamechanger. So many people just added Android as a target to their iOS apps, made a few layout tweaks, and they had a native Android app!









 Download the code and run the full credit scroll, or change the message to share with your friends. It is FireMonkey, and while I only tested it on Windows, it should work on Android, iOS, macOS, and even Linux if you are running
Download the code and run the full credit scroll, or change the message to share with your friends. It is FireMonkey, and while I only tested it on Windows, it should work on Android, iOS, macOS, and even Linux if you are running 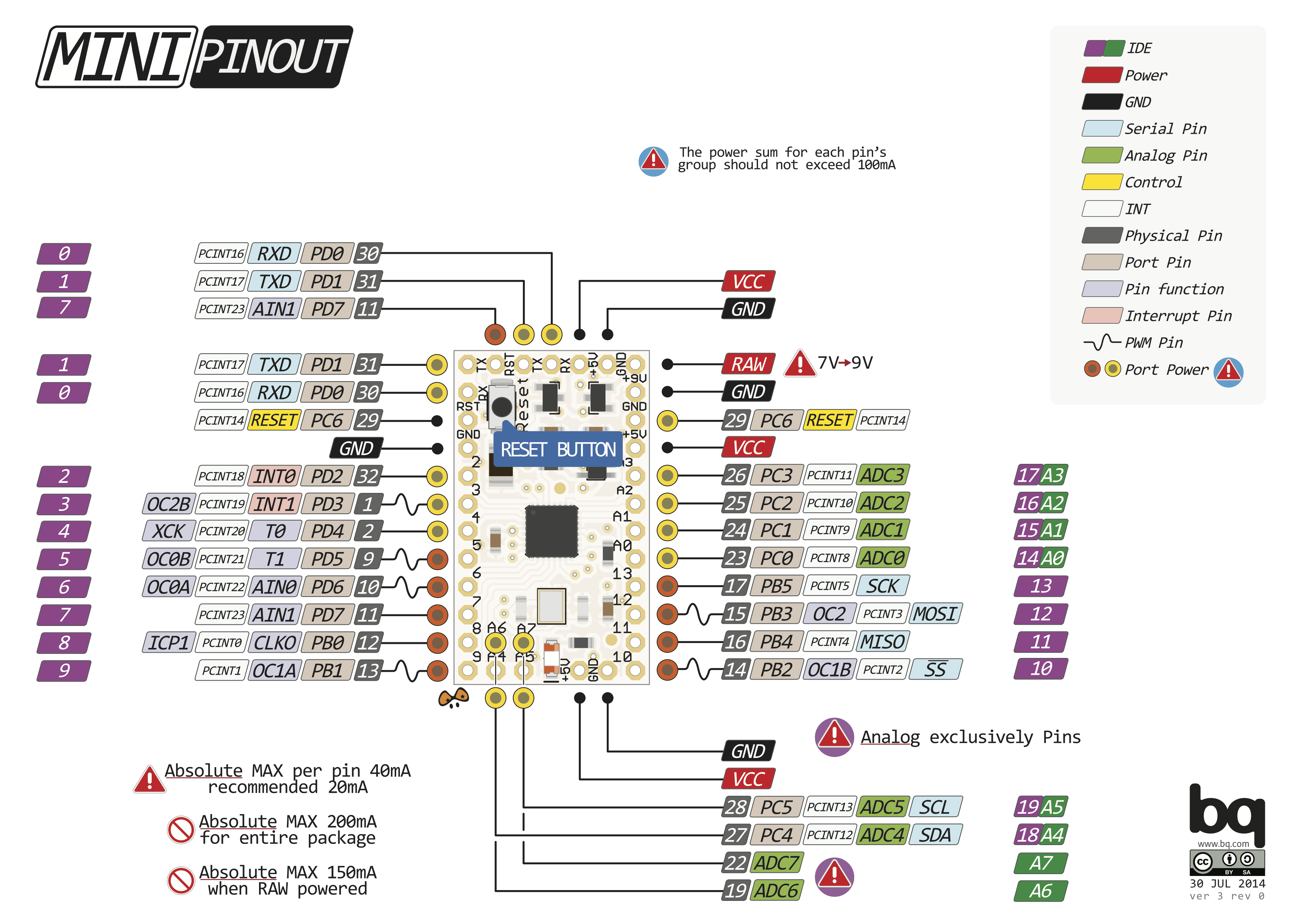{kind=link}